Individually addressable microscale robotic cilia have the potential to enable unprecedented control over microfluidic environments. They could be used to sort microscale particles, control chemical reactions, or transport viscoelastic materials. Artificial cilia could also be used to better our understanding of biological processes such as neurotransmitter transport in the brain and fluid clearing in the liver and lungs. Here, we report on the development of electrically actuated artificial cilia that pump fluid efficiently at the micron scale. These cilia consist of nanometer-thin platinum oxide and titanium layers that act as Surface Electrochemical Actuators (SEA).
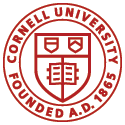
By choosing the right parameters, we can design artificial cilia systems that generate flows by efficiently pumping fluid. The pumping motion of the cilia can be seen in Fig. 1a, where a net flow is produced when the effective period of the cilia trajectory pumps more fluid than the recovery period. For this pumping to be efficient, the sperm number of the cilia (the ratio between the friction and elastic forces) should be somewhere between two and five. The sperm number is dependent on both frequency and cilia size (Fig. 1b) and can be tuned to achieve the desired flow properties.

Figure 1. (a) The time-irreversible motion of artificial cilia. (b) The relationship between sperm number and frequency.
The flows generated by artificial cilia are governed by the pumping velocity they can achieve. In our system, an artificial cilia of length 50μm reaches its maximum pumping velocity between 40-60Hz (Fig. 2). The distance the flow travels each second is similar to the cilia length, which is consistent with other artificial cilia systems.

Figure 2. The relationship between frequency and pumping velocity for a 50μm cilia.
Since we have demonstrated the efficacy of this system in pumping fluid at the microscale, it is now possible to create new microfluidic chips based on these electrically actuated artificial cilia (Fig. 3). We can generate arbitrary flow patterns by selectively actuating the cilia, which allows us to control and probe an array of microfluidic environments, both chemical and biological.

Figure 3. An example of a microfluidic chip
Here is video demonstrating how the artificial cilia pump water.